Robotpoleerimismasin – ülitäpne automatiseeritud pinnaviimistlus





Detailne diagramm
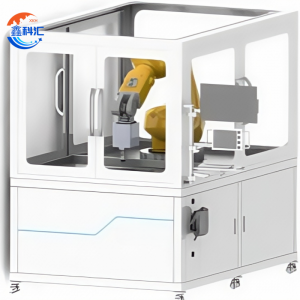

Robotpoleerimismasina ülevaade
Robotpoleerimismasin on täiustatud, täisautomaatne pinnatöötlussüsteem, mis on loodud vastama täppistootmise kõrgeimatele nõuetele. See ühendab endas kuueteljelise robotjuhtimise, jõutagasiside poleerimistehnoloogia ja kahepealise konfiguratsiooni, et käsitleda laia valikut materjale ja keerulisi geomeetriaid erakordse täpsuse ja järjepidevusega.
Olenemata sellest, kas tegemist on optiliste läätsede, lennundusdetailide, täppistehnika komponentide või pooljuhtide rakendustega, pakub see masin stabiilset, korratavat ja kvaliteetset pinnaviimistlust – isegi nanomeetri tasemel tolerantside korral.


Robotpoleerimismasina põhjalik tooriku ühilduvus
Süsteem toetab järgmiste andmete töötlemist:
-
Tasased pinnadklaasi, keraamika ja metallplaatide jaoks
-
Silindrilised ja koonilised kujundidnäiteks rullid, võllid ja torud
-
Sfäärilised ja asfäärilised komponendidoptiliste süsteemide jaoks
-
Vabakujuliste ja mitteteljeliste pindadekeerukate kõverate ja üleminekutega
Selle mitmekülgsus muudab selle sobivaksnii masstootmine kui ka ülitäpne eritellimusel tootmine.
Robotpoleerimismasina põhiomadused ja eelised
1. Kahe poleerimispea tehnoloogia
-
Varustatudühe pöördegajaisepöörleminepoleerimispead paindlikkuse tagamiseks.
-
Kiire tööriistavahetuse võimalus toetab mitut töötlemisrežiimi ilma pika seisakuajata.
-
Ideaalne jämeda ja peene poleerimise etappide vahetamiseks.
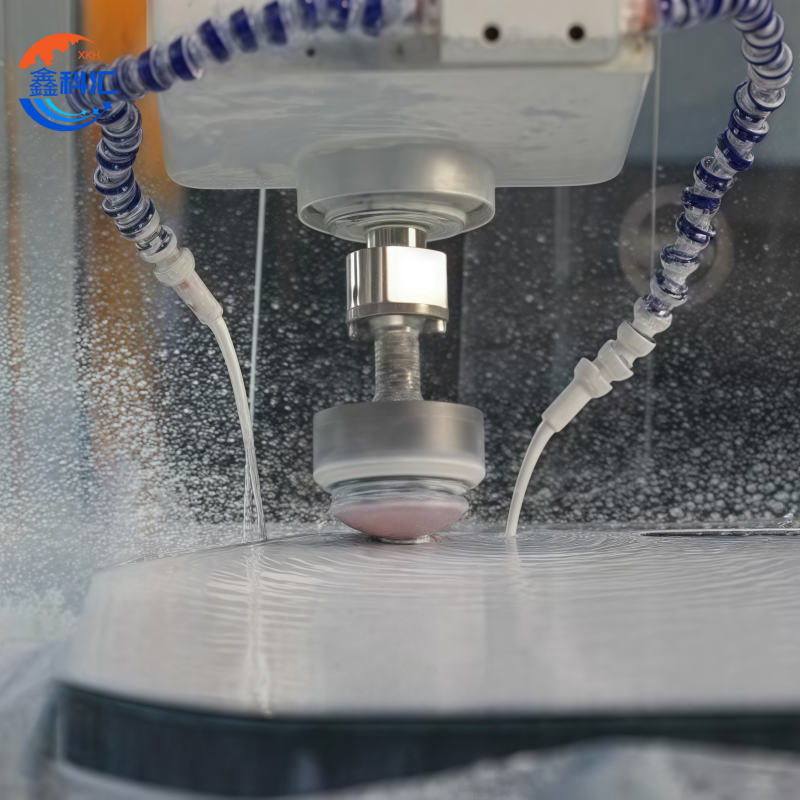
2. Täppisjõu juhtimissüsteem
-
Reaalajas jälgiminerõhk, temperatuur ja poleerimisvedeliku vool.
-
Järjepidev jõu rakendamine tagab töödeldava detaili ühtlase pinnaviimistluse.
-
Suudab automaatselt kohaneda pinna ebatasasustega.
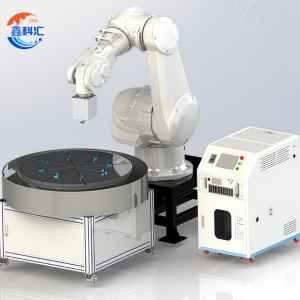
3. Kuueteljeline robotjuhtimine
-
Täielik liikumisvabadus keerukate geomeetriliste kujunditega toimetulekuks.
-
Täiustatud algoritmide abil arvutatud sujuvad ja täpsed liikumisteed.
-
Suur korduvpositsioneerimistäpsus alates ±0,04 mm kuni ±0,1 mm, olenevalt mudelist.
4. Nutikas automatiseerimine ja mõõtmine
-
Automaatse kalibreerimise tööriistad täpseks seadistamiseks ja joondamiseks.
-
Koordinaatmõõtesüsteem täpseks positsioneerimiseks.
-
Valikulinepaksuse jälgimine võrgusreaalajas kvaliteedikontrolli jaoks.
5. Tööstusklassi ehituskvaliteet
-
Kahe servomootoriga disain suurendab poleerimise efektiivsust ja stabiilsust.
-
Jäik mehaaniline konstruktsioon minimeerib vibratsiooni ja tagab pikaajalise vastupidavuse.

Robotpoleerimismasina tehnilised andmed
| Seadme mudel | Roboti keha | Korda positsioneerimistäpsust | Töötlemise läbimõõdu vahemik | Ühe pöördega poleerimispea | Mitme pöörlemisega poleerimispea | Väike tööriist | Peamise ratta tüübi poleerimine | Sfäärilise pea poleerimine | Lõpeta kiirvahetus | Automaatse kalibreerimise tööriist | Koordinaatide mõõtmise pea | Paksuse jälgimine veebis | Numbrilise juhtimise platvorm |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / täisvahemik | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / täisvahemik | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / täisvahemik | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / täisvahemik | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / täisvahemik | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / täisvahemik | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / täisvahemik | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
KKK – robotpoleerimismasin
1. Milliseid toorikuid robotpoleerimismasin töödelda saab?
Meie robotpoleerimismasin toetab mitmesuguseid kujusid ja pindu, sealhulgas tasaseid, kumeraid, sfäärilisi, vabakujulisi ja keerukaid kontuure. See sobib optiliste komponentide, täppisvormide, metallpindade ja muude ülitäpsete poleerimisrakenduste jaoks.
2. Mis vahe on ühe- ja mitmepöördelistel poleerimispeadel?
-
Ühe pöördega poleerimispeaTööriist pöörleb ümber ühe telje, mis sobib ideaalselt standardseks pinnaviimistluseks ja kiireks materjali eemaldamiseks.
-
Mitme pöörlemisega poleerimispeaTööriist ühendab pöörlemise isepöörlemisega (orbitaalse liikumisega), võimaldades ühtlasemat poleerimist kõveratel ja ebatasastel pindadel.
3. Milline on maksimaalne töötlemisläbimõõt?
Sõltuvalt mudelist:
-
Kompaktsete mudelite (nt IRP500S) käepideΦ50–Φ500 mm.
-
Suuremahulised mudelid (nt IRP2000AD) suudavad hakkama saada kuniΦ2000mm.
Meist
XKH on spetsialiseerunud spetsiaalse optilise klaasi ja uute kristallmaterjalide kõrgtehnoloogilisele arendamisele, tootmisele ja müügile. Meie tooted on mõeldud optilisele elektroonikale, tarbeelektroonikale ja sõjaväele. Pakume safiiroptilisi komponente, mobiiltelefonide objektiivikatteid, keraamikat, LT-d, ränikarbiidist SIC-i, kvartsist ja pooljuhtkristallplaate. Tänu oskusteabele ja tipptasemel seadmetele oleme silmapaistvad mittestandardsete toodete töötlemisel, seades eesmärgiks olla juhtiv optoelektrooniliste materjalide kõrgtehnoloogiline ettevõte.

Seotud tooted
-

4H-pool-HPSI 2-tolline SiC substraatvahvel Tootmis...
-
Kohandatud ruudukujulise kasti transpordikast ruudukujulise aknaga p ...
-

6-tolline HPSI SiC substraadi vahvel ränikarbiidist ...
-

Safiirkorund vääriskivi Al2O3 kristall-rub...
-

Alumiiniummetallist monokristalli aluspinna poleerimine...
-

Au-kattega vahvel, safiirvahvel, ränivahvel...